在计算机网络工程领域,仿真技术是验证系统设计、分析网络性能、确保通信可靠性的关键工具。Canoe(CAN Open Environment)作为一款广泛应用于汽车电子和工业通信领域的专业仿真与测试软件,其仿真工程在总线系统开发中扮演着至关重要的角色。本文重点介绍Canoe的第3个仿真工程,聚焦于其总线仿真的核心功能与网络拓扑结构。
一、 总线仿真功能详解
Canoe的第3个仿真工程通常围绕特定总线(如CAN、LIN、FlexRay、Ethernet等)的深度仿真与测试展开。其主要功能模块包括:
- 网络节点仿真:可以模拟网络中的多个电子控制单元(ECU),包括它们的行为逻辑、通信协议栈(如CANoe自带的CAPL脚本实现)以及交互流程。用户可以定义节点发送和接收的报文(Message)内容、周期、触发条件等,以构建复杂的通信场景。
- 总线通信仿真与监控:该工程能够模拟总线的物理层与数据链路层行为,实时仿真总线上的信号传输、仲裁、错误帧等。其强大的跟踪窗口(Trace Window)可以高亮显示所有网络活动,包括报文、信号值、错误和事件,便于工程师进行实时监控和离线分析。
- 信号与系统变量交互:支持对报文中的信号(Signal)进行可视化操作和逻辑关联。用户可以通过面板设计器(Panel Designer)创建图形化控制面板,动态修改信号值,并观察网络中其他节点的响应,实现人机交互式仿真。
- 自动化测试与评估:集成测试功能单元(Test Feature Set),支持编写和运行自动化测试序列(Test Sequences),对网络通信的时序、容错、一致性等进行自动化验证,并生成详细的测试报告,评估系统是否符合设计规范。
- 诊断与协议仿真:可集成诊断功能(如UDS on CAN),仿真诊断仪与ECU之间的诊断通信,用于测试和验证车辆诊断服务。
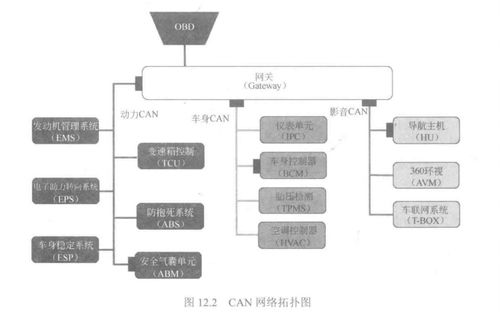
二、 网络拓扑结构配置
在Canoe的第3个仿真工程中,网络拓扑的定义是仿真的基础。它描述了网络中各个节点(ECU仿真节点、真实ECU接口、网关等)以及总线通道之间的连接关系。配置过程主要包括:
- 拓扑图构建:在Canoe的仿真设置界面,用户可以通过图形化方式拖拽组件来构建网络拓扑。一个典型的拓扑可能包含:
- 多个仿真ECU节点(Simulated ECUs),由CAPL程序或系统变量控制其行为。
- 网络接口硬件(如VN1600系列接口卡),用于连接真实的ECU或网络段,实现“硬件在环”(HIL)仿真。
- 网关节点(Gateway),模拟在不同总线类型(如CAN和LIN)之间进行报文路由与转换的设备。
- 总线通道(Channel),代表不同类型的物理网络(如CAN High, CAN Low)。
- 通道与节点关联:将每个仿真节点或硬件接口精确地分配到指定的总线通道上。例如,发动机ECU仿真节点和变速箱ECU仿真节点可能被分配到同一个高速CAN通道上,而车身控制模块则可能被分配到一个低速CAN或LIN通道上。
- 数据库集成:网络通信的“语言”由数据库文件(如DBC文件用于CAN,LDF用于LIN)定义。在工程中必须导入或关联相应的数据库,以便Canoe能够正确解析和生成报文与信号,确保仿真的语义准确性。
- 系统变量与网络绑定:定义全局或局部的系统变量,并将其与网络信号或节点状态绑定,实现跨节点的数据共享与同步控制。
Canoe的第3个仿真工程是计算机网络工程实践中一个功能强大的虚拟实验室。它通过高度可配置的总线仿真功能和灵活的网络拓扑建模,使工程师能够在产品开发早期就对复杂的车载网络或工业通信系统的功能、性能及可靠性进行全面的验证与测试,极大地缩短了开发周期,降低了实物测试的成本与风险。掌握其核心功能与拓扑配置,是进行高效、可靠网络系统设计与测试的关键技能。